Humminbird View 360 Imaging
Nowy produkt firmy Humminbird, umożliwiający tworzenie obrazu dna znajdującego się pod jednostką.
 Poniżej znajduje się filmik reklamowy urządzenia, bardzo jestem ciekaw, czy korzystaliście już z tego rozwiązania.
Poniżej znajduje się filmik reklamowy urządzenia, bardzo jestem ciekaw, czy korzystaliście już z tego rozwiązania.

Ponownie ruszyliśmy w teren z nowymi doświadczeniami, oprogramowaniem i sprzętem.
W trakcie ostatnich targów Wiatr i Woda zapoznaliśmy się z nowymi technologiami kilku producentów i jak zwykle jesteśmy pod wielkim wrażaniem. Na rynku pojawiają się nowe urządzenia z dotychczas niewyobrażalnymi funkcjami, a ceny dotychczasowych podstawowych modeli echosond znacznie spadają.
Przykładem pierwszego zjawiska jest pojawienie się w sprzedaży technologii Panoptix – GARMIN. Jego zastosowanie zarówno w trakcie połowu ryb, jak również przy pracach podwodnych może okazać się nieodzowna.
Przykładem drugiego wspomnianego zjawiska, jest niespotykana cena Garmina Fishfinder 350c. Urządzenie dostępne jest na rynku już za 649 PLN
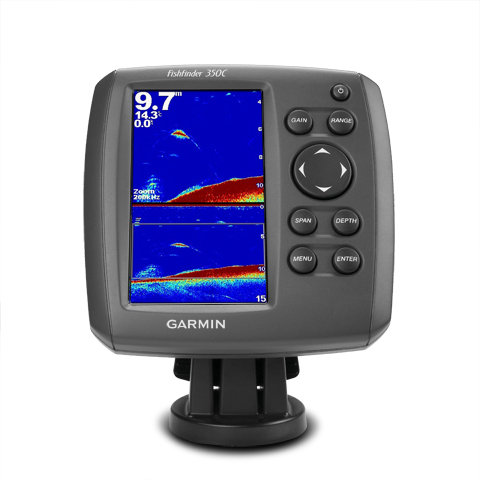
Echosonda FishFinder 350c
Jak do tej pory koszt zakupu echosondy z pięciocalowym kolorowym wyświetlaczem wynosił ponad 1000 PLN. Porównując konkurencję, za echosondę Lowrance Mark-5x Pro z pięciocalowym monochromatycznym wyświetlaczem musimy zapłacić 999 PLN.
Jak widać firmy starają się jak mogę, aby wybór pomiędzy urządzeniami kolorowymi, a czarno-białymi był dla nas prostszy.
Chciałbym się dzisiaj podzielić moimi przemyśleniami, które są konkluzją po Targach Wiatr i Woda. Jako “POMOC” uczestniczyłem w targach na stoisku echosonda.pl. Naszym celem, było propagowanie wędkarstwa z użyciem echosond dostępnych ma rynku. Służyliśmy radą i poradą w kwestii wyboru sprzętu do swoich potrzeb finansowych i organizacyjnych. Wciąż nowe modele wchodzące na rynek, nowe możliwości sprawiają, że osoba nie śledząca na bieżąco tematu zaczyna się gubić w gąszczu nowinek technicznych. Echosonda to już nie tylko urządzenie służące do pomiaru głębokości i temperatury powierzchniowej wody. Obecny sprzęt dokładnie wskaże nam lokalizację ryb i ich głębokość, za pomocą wbudowanego odbiornika GPS jesteśmy w stanie określić swoje położenie, a dzięki możliwości zapisu danych na karcie microSD stworzymy swoją własną batymetrię zbiornika.
Ostatnią z komercyjnych nowinek jest tryb widoku sonaru bocznego. W droższych zestawach (Lowrance HDS + LSS1, SIMRAD + LSS1 lub Humminbird seri 800 czy 900) mamy do wyboru kilka trybów widoku. Przydatny podczas poszukiwań tryb sidescan obrazujący powierzchnie dna z wszelkimi elementami. Widok downscan przypominający nieco tryb zwykłej echosondy, gdzie obserwujemy obraz toni wody niejako z boku.
Jest to jednak interpretacja konkretnych kształtów w toni wody. Nie zobaczymy tu charakterystycznych łuków, które wskażą nam obecność pod wodą ryby (pęcherza pławnego wypełnionego powietrzem).

Tu właśnie dochodzi do różnych niedomówień i niejasności. Wiele osób zakupuje tańsze wersje echosond (Elite 4x DSI, Elite 5 DSI, Mark 5x DSI) z widokiem DOWNSCAN IMAGIN nie wiedząc o tym, że pod wodą zobaczą jedynie niewielkie PUNKTY, które mogą być rybą, ale równie dobrze jakimkolwiek przedmiotem unoszącym się w toni wody. Tryb ten pięknie przedstawi nam roślinność podwodną, wszystkie elementy w toni, ale NIE NADAJE SIĘ DO POSZUKIWANIA RYB. Dodatkowo widok DownImagin czy też Downscan stworzy nam dokładny obraz tylko w momencie kiedy przemieszczamy się. W bezruchu zobaczymy jedynie pojedyncze kreski mające mały związek z obrazami przedstawianymi na reklamach.
Jedynie tryb zwykłej echosondy jest w stanie wskazać nam przeskok prędkości dźwięku w toni pomiędzy ośrodkiem cieczy a powietrzem (ryby). Różnica prędkości rozchodzenia się dźwięku w cieczy zależy przede wszystkim od jej temperatury, więc każda z echosonda musi wykonać pomiar tego parametru, jest to standard.
woda 15 c 1450 m/s
powietrze 0 c 331,3 m/s
powietrze 15 c 340,3 m/s ≈ 1225 km/h
Rozwiązaniem tego problemu mogą być echosondy Humminbird serii 500, gdzie poza widokiem zwykłej echosondy mamy widok DownImagin dokładnie obrazujący kształty elementów pod wodą.
 Poniżej kilka linków, z naszych testów sonaru bocznego
Poniżej kilka linków, z naszych testów sonaru bocznego
Oto ciekawa alternatywa dla produktów firmy RDI TELEDYNE.
Urządzenie pomiarowe dorównuje funkcjonalnością River Ray. W czasie pomiaru w pełni automatycznie dokonuje ustawień wielkości komórek co usprawnia prace.
W dniu 10 czerwca 2010 roku ekipa pomiarowa z Lublina ( A. Jaroszewski i M. Brodziak ) brała udział w pokazie i pomiarach testowych urządzenia ADCP River Ray w Warszawie (profil Spójnia). Pokaz – w czasie pokazu francuski przedstawiciel RDI od podstaw przedstawił montaż głowicy urządzenia w trimaranie oraz istotne zmiany w pracy urządzenia pomiarowego w stosunku do RG 600 kHz.
Zalety (+)
– komunikacja bezprzewodowa między urządzeniem i laptopem (Bluetooth) przydatna do pomiarów na uwięzi z mostów.
– zautomatyzowane dobierane przez urządzenie parametrów pomiarowych dotyczących głębokości, prędkości wody, ilości a w szczególności wysokości komórek pomiarowych (bardzo przydatne przy pomiarach powodziowych z rozległymi terenami zalewowymi o mniejszych głębokościach w stosunku do koryta głównego).
– niezatapialny, lekki, solidny pływak do szybkiego montażu przydatny do pomiarów z mostu na uwięzi.
Wady (-)
– brak koncepcji systemowej mocowania pływaka do łodzi pomiarowej (jako opcja do dokupienia, doposażenia) w czasie wykonywania pomiarów przy normalnych warunkach w zwartych korytach
– brak przydatności pływaka przy pomiarach powodziowych mimo własności hydrodynamicznych trimaranu do 4m/s (ciągnięcie pływaka za łodzią nie wchodzi w grę, umocowanie go na bocznym lub przednim wysięgniku przy dużej turbulencji wody skutkowało by dostawaniem się powietrza pod głowicę).
Pomiary testowe
– w czasie pomiarów testowych z przyczyn technicznych została wykonany tylko jeden pomiar przy użyciu River Ray. Trudno więc mówić o porównaniu wyników pomiaru w stosunku do RG 600 czy 1200kHz.
Natomiast mimo zapewnień przedstawiciela RDI a także dystrybutora urządzenia że River Ray doskonale radzi sobie ze śledzeniem dna w każdych warunkach (nawet ekstremalnych) pomiar po BT urządzeniem River Ray był mniejszy o 300m3/s niż przy użyciu GPS wspomagającym to urządzenie.
Odpowiednio pomiary wykonywane przy użyciu RG 600 i 1200 wykazały różnicę między BT i GPS około 500m3/s.
Wnioski
– urządzenie River Ray czego nie ukrywał przedstawiciel RDI nie jest nowością na rynku tego typu urządzeń lecz tylko specyficznym, rozbudowanym (przyjaznym dla operatora) narzędziem pomiarowym przystosowanym do prowadzenia pomiarów przy normalnych nie ekstremalnych warunkach pomiarowych (pływak trimaran). Warto zastanowić się jednak nad możliwością zastosowania samej głowicy urządzenia RR przy pomiarach ekstremalnych i wykorzystania jej zalet tak jak obecnie stosowanej głowicy RG mocowanej na sztycy w dnie łodzi. Jedynym problemem jest inna średnica głowicy w stosunku do głowicy RG która skutkowała by potrzebą wykonania nowego systemu mocowania w dnie łodzi.
——————————————————–
Jaroszewski Andrzej
Podsumowanie i wnioski dotyczące testu River Ray ADCP w przekroju pomiarowym Modlin
10 czerwca 2010 roku grupa pomiarowa w składzie: Marlena Wiercińska, Krzysztof Kasprzak, Tomasz Lewicki i Michał Mazgajski wraz z francuskim przedstawicielem RDI dokonała pomiarów testowych urządzenia River Ray ADCP na Wiśle w profilu Modlin. Pomiary wykonano na wodzie opadającej, przy max prędkości wody w nurcie sięgającej nieco ponad 3 m/s.
Głowica urządzenia mocowana jest na pływaku (trimaranie). Komunikacja między urządzeniem, a laptopem z oprogramowaniem odbywa się za pomocą Bluetooth. Jest to niewątpliwe zaleta. Ograniczona jest ilość kabli na łodzi. Złożenie całego zestawu jest procesem szybkim i łatwym. Problem pojawia się w kwestii sposobu mocowania ADCP do łodzi. Podczas pomiarów testowych stosowano dwa rodzaje holowania urządzenia. Podczas pierwszych przejazdów River Ray był trzymany przez jednego z pomiarowców na rurkach od młynka hydrometrycznego, równolegle do łodzi. Ten sposób był rozwiązaniem prowizorycznym i absolutnie nie wchodzi w grę w trakcie standardowych pomiarów. Drugim sposobem było holowanie pływaka na linie ok. 20 m za łodzią pomiarową. Jest to rozwiązanie lepsze aczkolwiek niemożliwe do zastosowania w sytuacji wezbraniowej, kiedy konieczne jest pływanie pomiędzy zalanymi drzewami i krzewami w międzywalu. Wg ww. grupy pomiarowej, najkorzystniejszym rozwiązaniem byłoby zrezygnowanie z pływaka i mocowanie głowicy do sztycy, a następnie do burty, bądź w dnie łodzi, tak jak ma to miejsce w przypadku obecnie stosowanych ADCP Rio Grande. Jednocześnie wydaje się, że ADCP River Ray byłby rozsądną alternatywą dla pomiarów wezbraniowych, robionych z mostów za pomocą Stream Pro, gdyż pływak River Ray jest bardziej stabilny przy dużej prędkości wody.
Sam pomiar River Ray jest wysoce zautomatyzowany. Nie jest wymagane wprowadzanie maksymalnych prędkości wody oraz maksymalnej głębokości w profilu przez użytkownika. Wszelkie parametry trybu pracy urządzenia są dobierane automatycznie, na bieżąco w zależności od uzyskanych danych. Rozwiązanie to ma swoje zalety i wady. Do zalet niewątpliwie należy fakt, iż nie trzeba wprowadzać stałej wartości BS (Bin Size) czyli wielkości komórek pomiarowych. Daje to możliwość pobierania danych o prędkości wody bez względu na bardzo częste i wyraźne zróżnicowanie głębokości w profilach występujących na terenie DSPO Wa. Urządzenie dobiera również swój tryb pracy, tzw. WM (Water Mode), w zależności od rodzaju przepływu i głębokości w przekroju. Wadą może być brak możliwości ingerencji użytkownika w niektóre parametry rejestrowania danych, które, w przypadku starszych wersji ADCP dawały możliwość polepszenia jakości uzyskiwanych danych uwzględniając specyfikę danego profilu pomiarowego.
Kolejną bardzo istotną kwestią jest użycie GPS, szczególnie przy pomiarach powodziowych. Według przedstawiciela RDI, system śledzenia dna BT (Bottom Track) jest w przypadku River Ray na tyle doskonały, że śmiało można opierać się tylko na wskazaniach z tego właśnie trybu rejestracji przepływu. Z doświadczenia ekip pomiarowych wynika jednoznacznie, że w przypadku występowania dużych prędkości wody, dochodzi do intensywnego przemieszczania dna rzeki (ruchome dno, proces saltacji). Zaburza to zdecydowanie wyniki pomiarów w trybie BT. Niezbędne jest wtedy użycie GPS, który ustalając pozycje, kierunek i prędkość łodzi niezależnie od dna rzeki, daje bardziej wiarygodne wyniki pomiarów. Różnica w przepływie, zmierzonym za pomocą River Ray w Modlinie, między wynikiem z BT, a trybem GPS sięga 550 m3/s, co zdecydowanie wykracza poza akceptowalny błąd pomiarowy. Różnicę w trasie przejazdu między BT, a trybami GPS (VTG i GGA) widać wyraźnie na Rys.1. Zatem nawet w przypadku stosowania unowocześnionego ADCP, użycie GPS przy dużych prędkościach wody i piaszczystym dnie, jawi się jako czynność konieczna. Należy też zwrócić uwagę na dużą liczbę „pustych pionów” w przekroju pomiarowym, Rys. 2. Zatem spora część pól prędkości musi być szacowana, doliczana za pomocą algorytmu zastosowanego w oprogramowaniu.
Rys. 1

Najwyraźniej Bottom Track, nawet dopracowany, nie radzi sobie idealnie przy występowaniu przepływu turbulentnego, wirów i dużej objętości transportowanego przez rzekę materiału unoszonego. Przyczyną może też być mocowanie głowicy na pływaku, który jest podatny na falowanie i zaburzenia przepływu w strefie przypowierzchniowej.
Rys. 2
WNIOSKI:
Nowe urządzenie pomiarowe zostało zaprezentowane w dniach 10-11 czerwca. Grupy pomiarowe miały okazje zapoznać się z obsługą, a także sprawdzić możliwości River Ray.

Urządzenie już w trakcie programowania wykazało swoją wyższość nad poprzednikiem ADCP. Wszystkie podstawowe parametry: maks. głębokość, wielkość komórek, tryb WaterMode; są automatycznie ustawiane w trybie rzeczywistym. Urządzenie jest “inteligentne” i na podstawie mierzonej głębokości i mierzonej prędkości wody samo ustala najlepsze współczynniki.
W dniach 10-11 czerwca grupy pomiarowe IMGW przetestują nowe urządzenie służące do pomiarów objętości przepływu.
RiverRay zostanie wypróbowany w ciężkich warunkach powodziowych na Wiśle w kilku profilach pomiarowych.
Już wkrótce reportaż z testów.
Powodzeniem zakończyły się testy nowego urządzenia firmy Lowrance – Structure Scan. Dzięki współpracy z Echosonda.pl przez długi okres mogłem użytkować i sprawdzać możliwości tej nowinki. Sprzęt był testowany zarówno na wodach płynący, jak również na jeziorach potencjalnie uważanych jako “nurkowe”, gdzie mogłem obserwować liczne “nurkowe atrakcje”. Głębokości na jakich pracowałem mieściła się w zakresie 1-31m.
W pierwszym etapie pracowałem na rzekach korzystając z jednostki z silnikiem spalinowym. Widok urządzenia pozwalał na wizualizację charakteru dna, a także odnalezienie większych przeszkód znajdujących się pod wodą. W tych warunkach Structure Scan sprawdzał się.


Podczas eksploracji dna, ważnym elementem jest prędkość. W przypadku przekroczenia granicznej prędkości pracy urządzenia, obraz jest pozbawiony części danych, co widać na poniższym obrazku. Według producenta zalecana jest szybkość nieprzekraczająca 16km/h

Drugim etapem były testy na jeziorze. Wybrałem jezioro Białe, które jest mi znane, gdyż nurkowałem w nim. Głębokość maksymalna to 31m, co pozwala na sprawdzenie Structure Scan w innych warunkach. Pomocna staje się częstotliwość 455kHz, która jest przeznaczona do pracy na większych głębokościach. Jest wyraźna różnica w ilości szczegółów

Woda “stojąca” pozwala na dokładne napływanie na wyznaczone transekty, dzięki czemu jesteśmy w stanie zobrazować maksymalnie duży obszar. Systematyczne badanie zbiornika uwidacznia zróżnicowanie dna, a także pozwala na odnalezienie maksymalnej ilości podwodnych przeszkód.
[flagallery gid=4 name=”Gallery”]
Testy należy zaliczyć do udanych. Urządzenie doskonale nadaje się do wizualizacji dna i poszukiwania przedmiotów czy przeszkód.


{kind=link}